KAI800S3 -284.62KB
Download BrochureManipulator
Robot Arm for Injection Molding Machine
Injection Molding Robot
Traverse Robot Arm
3-Axis Robot
Robot Arm
Manipulator for Injection Machine

Technical Details
|
Basic Mechanical Specifications |
|||||||||
|
Model |
Suitable Machine Range |
Axis Strokes ( mm ) |
Driving Method |
C Axis Posture ( 90°) |
Linear Position Repeatability (mm ) |
Net Weight ( kg ) |
|||
|
Traverse |
Crosswise |
Vertical |
Maxi load kg |
C Axis Posture Torque ( Nm) |
|||||
|
KAI800S3 |
90--200T |
1300 |
620 |
800 |
AC Servo Motor |
5 |
25 |
+- 0.1 |
230 |
|
Minimum Infrastructure Requirements |
|||
|
Working pressure (kgf\cm) |
Consumption (NL\cycle) |
Maximum Power ( Kw ) |
Power ( AC ) Single Phase |
|
5 -- 7 |
1.0 |
1.2 |
220 V, 50/60 HZ |
|
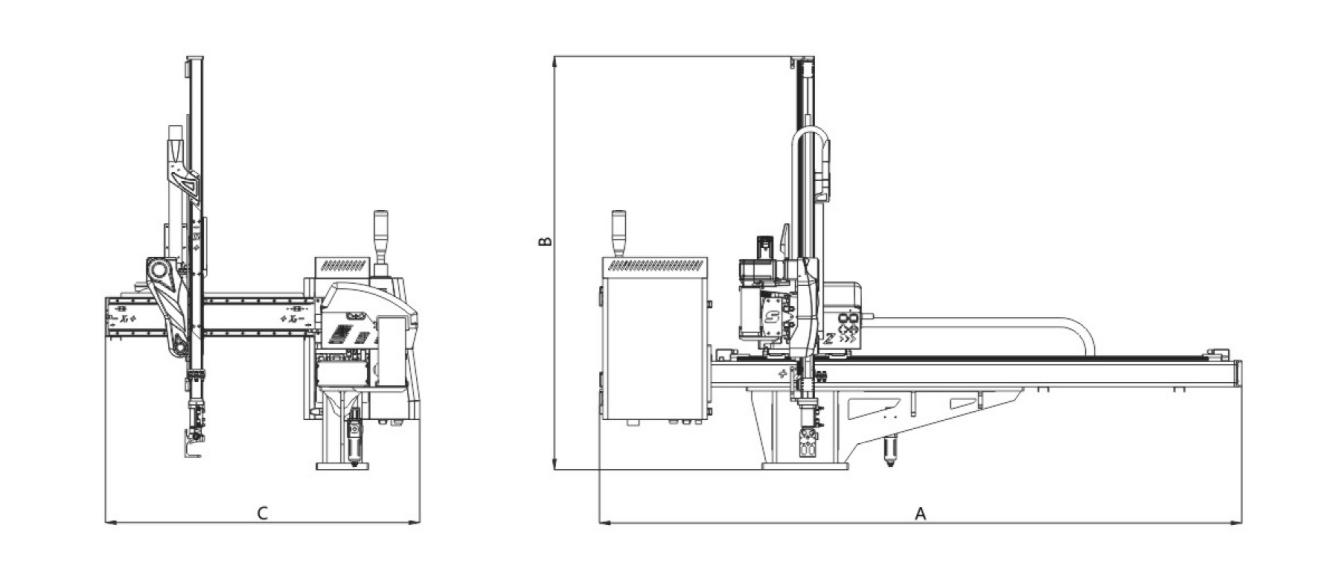
External Size |
|||
|
Model |
A |
B |
C |
|
KAI800S3 |
1850 |
1560 |
1360 |
Simplify the robot control arm solution
- A 10-30% increase in productivity
- Reduce manual errors
- Improve efficiency and accuracy
- Prevent injuries
- Streamline manual and monotonous process
Ideally designed structure for take-out time reduction (up to 20%)
・Durability has been improved by 60% by analyzing its frame structure and re-evaluating the balance of its center gravity.
・Range of vibration and the convergence time is reduced.
・The balance and driving specification of the arm has been re-evaluated to suppress its twisting and increase moving speed.
・Improved maximum payload performance:
A complex EOAT for insert/multiple placement is adaptable.
The ideally designedKEFAN series contributes to improving productivity in factories, generating faster take-out time and a wider range of the maximum payload.










